 22/06/15
22/06/15Det er en utfordring å fange opp lys som ikke er i fokus for å oppnå klare bilder med høy kontrast i mange bildebehandlingsapplikasjoner. Digital Scanned Light Sheet Microscopy (DSLM) tilbyr en effektiv måte å redusere lys som ikke er i fokus på ved å synkronisere belysning med den «rullende lukkeren» i moderne CMOS-kameraer. Denne presise synkroniseringen krever imidlertid full kontroll over bruken av kameraets rullende lukker – en funksjon som tilbys av Tucsen-kameraer med Rolling Shutter Control Mode.
Hva er rulleport?
Lukkeren er den delen av kameraet som starter og stopper kameraets lyseksponering. Tidligere brukte vitenskapelige kameraer mekaniske lukkere, som åpnet seg for å eksponere et bilde og lukket seg for å avslutte eksponeringen. Mekaniske lukkere var trege og utsatt for pålitelighetsproblemer ved langvarig bruk. Nå bruker vitenskapelige kameraer elektroniske lukkere, som er betydelig raskere, enklere og mer allsidige.
Rullende lukkerkameraer starter innsamlingen øverst på sensoren, og «ruller» ned linje for linje til bunnen av sensoren. Denne innsamlingen involverer tre prosesser: tilbakestilling av signal, lyseksponering og avlesning.
Eksponeringen av hver rad startes ved å tilbakestille hver piksels innhentede signal. Etter at den angitte eksponeringstiden for den øverste raden har gått, ruller avlesningen, som markerer slutten på innhentingen, ned på samme måte. Dette etterlater et område med aktive piksler som sveiper fra toppen til bunnen av kameraet, med høyden bestemt av lengden på eksponeringstiden. Når kameraet kjører på full hastighet, er forsinkelsen per linje vanligvis mellom 5 og 25 mikrosekunder per linje med piksler, avhengig av kameraets hastighet.
For å dra nytte av optiske teknikker som krever synkronisering av skanning av belysning og kameraets rullende lukker, er denne forsinkelsen vanligvis for kort, noe som betyr at rullende lukker opererer for raskt til at annen maskinvare kan holde tritt. Det er her rullende lukkerkontrollmodus kommer inn i bildet.
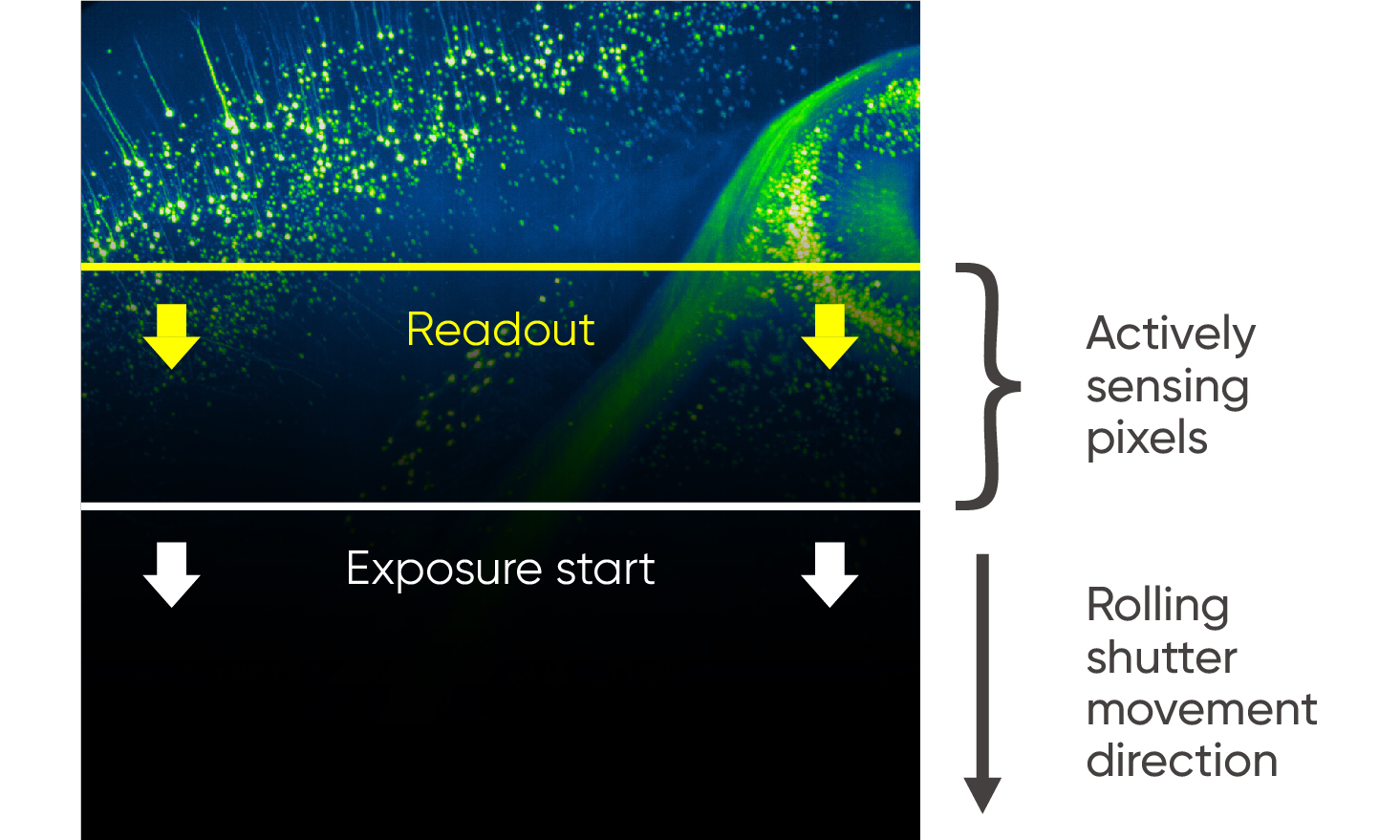
Figur 1: Skjematisk diagram av rulleportens drift
Slik fungerer rullende skoddekontrollmodus
Gjennom innebygd intelligens i Tucsen-kameraer kan kameraets rullende lukker finjusteres nøyaktig for å synkronisere med ekstern maskinvare. Ved å legge til en liten ekstra forsinkelse mellom tilbakestillingen og avlesningen av hver linje, kan tiden det tar for det aktive pikselområdet å sveipe nedover sensoren kontrolleres for å tillate denne synkroniseringen.
Videre kan «spaltehøyden» til det skannede aktive området finjusteres. Lengre eksponeringstider eller kortere linjetidsforsinkelser fører til større spaltehøyde. Når det gjelder DSLM, kan dette brukes til å matche kun det opplyste området av prøven, og dermed finne en balanse mellom å eksponere piksler i maksimalt mulig tid for effektiv signalfangst, og å minimere lys som er ute av fokus.
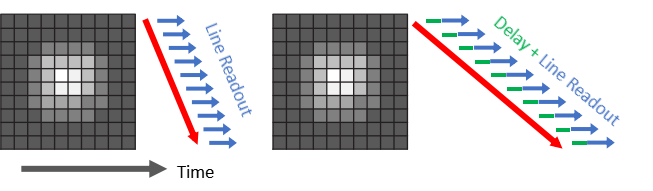
Figur2Venstre: Skjematisk fremstilling av rullende lukkerhastighet ved full kamerahastighet. Høyre: Skjematisk fremstilling av rullende lukkerhastighet med rullende lukkerkontrollmodus som legger til ekstra forsinkelse mellom hver linje for å tillate synkronisering med annen maskinvare.
Med denne valgfrie forsinkelsen er det nå tre viktige variabler å forstå som bestemmer driften av den rullende lukkeren, som indikerer høyden på området med «aktive» piksler og hvor raskt den beveger seg forbi sensoren.
LinjetidDette er standardtiden sensoren bruker på å lese av én rad og gå videre til den neste. Den bestemmer kamerasensorens native «hastighet», og kan spesifiseres i kameraprogramvaren, eller tilnærmes for et gitt interesseområde (ROI) og kameramodus ved å:

Der «Maksimal kamerabildefrekvens» refererer til bildefrekvensen når den ikke er begrenset av enten eksponeringstid eller ekstern utløserfrekvens.
Eksponeringstid:Dette bestemmer hvor lenge hver pikselrad er aktiv, og bestemmer dermed høyden på det aktive området for en gitt linjetid og forsinkelsestid.
Linjetidsforsinkelse:Dette er hvor mye ekstra forsinkelse som legges til av rullende lukkermodus. Rullende lukkermodus tillater at forsinkelse legges tili heltallsmultipler av linjetidenHvis for eksempel linjetiden for et kamera er 10 mikrosekunder, vil en ekstra forsinkelse per linje på 1, 2,…opptil 8 928, kan legges til, noe som indikerer antall multipler av 10 mikrosekunder.
Høyden på interesseområdet (ROI) som brukes er også viktig, da dette vil bestemme antall linjer det aktive området må sveipe ned før tilbakestilling.
Rullende portkontrollmodus Synkroniseringsmoduser
Det er to driftsmoduser for rulleportkontrollmodus, avhengig av hvilken variabel som er viktigst å kontrollere.
In Linjetidsforsinkelsesmodus, kan du stille inn forsinkelsestiden som spesifisert ovenfor. Programvaren kan deretter indikere, for den angitte eksponeringstiden, hva den resulterende spaltehøyden vil være – høyden på aktive piksler i rullende lukker.
In Aktiv piksel / spaltehøydeI modus kan du angi antall rader med sensoren du vil skal være aktiv når rullelukkeren beveger seg. Eksponeringstiden du har spesifisert vil deretter bli brukt til å beregne den nødvendige linjetidsforsinkelsen for å levere denne spaltehøyden automatisk.
Konfigurere rulleportkontrollmodus i programvare
Driftsmodus (status) kontroller
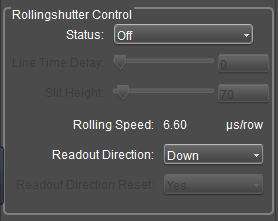
Figur 3: Eksempelgrensesnitt for å kontrollere rulleportkontrollmodus fra Tucsen Mosaic-programvaren. Alle alternativer tilgjengelig via Micro-Manager og SDK.
Tre statuser (driftsmoduser) er tilgjengelige:Off, Linjetidsforsinkelse, Spaltehøyde.
• Når den er satt tilAv, sensoren oppfører seg som normalt uten ytterligere forsinkelse.
• Når den er satt tilLinjetidsforsinkelseI modus kan du angi linjetidsforsinkelsen i enheter av linjetiden, som forklart ovenfor.
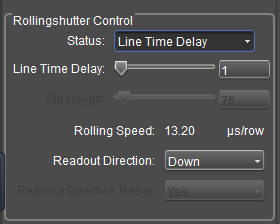
Figur 4: Programvarealternativer for linjetidsforsinkelse. Eksempelgrensesnitt fra Tucsen Mosaic-programvaren. Alle alternativer er tilgjengelige via Micro-Manager og SDK.
Antall linjetidssykluser som kan legges til den konfigurerbare forsinkelsen varierer fra kamera til kamera. Kameraets nye linjetid, etter at forsinkelsen er lagt til, er da:
Linjeintervalltid = Linjetid(sensor)+(Linjetid(sensor)× Linjetidsforsinkelse)
Parameterverdien tilRullehastigheter likLinjeintervalltid.
Den totale avlesningstiden for bildet er da:
Rhodeutetid(bilde)= Linjeintervalltid×Nrader.
Nraderer det totale antallet rader med bildepiksler i interesseområdet. Bildefrekvensen ved avbildning i denne modusen avhenger av antall linjer som skal avbildes og linjesyklustiden:
Bildefrekvens = 1/(Avlesningstid(bilde)+ Eksponeringstid)
•Når den er satt tilSpaltehøyde mode, kan du stille innstørrelsen på det aktive området som skannes, gitt av tAntall pikselrader mellom "tilbakestillings"-signalet og "avlesnings"-signalet.Området for spaltehøyde er 1–2048, i pikselenheter. For å konvertere dette til en fysisk størrelse, multipliser denne verdien med pikselstørrelsen fra kameraets spesifikasjonsark.
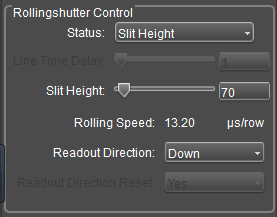
Figur 5: Kontrollalternativer for spaltehøydemodus. Eksempelgrensesnitt fra Tucsen Mosaic-programvaren. Alle alternativer er tilgjengelige via Micro-Manager og SDK.
Programvaren vil automatisk beregne nødvendig linjeforsinkelse og linjeintervalltid. Formelen er som følger:
Linjetidsforsinkelse = Eksponeringstid(Linjer)/ Spaltehøyde(Linjer)
I høyhastighetsmodus (kameraets forsterkningsmodus) kan spaltehøydeområdet bare settes til et partall, siden linjene leses ut to ganger to i den modusen. Parametrene i høyhastighetsmodus beregnes som følger.
Linjetidsforsinkelse = Eksponeringstid(Linjer)/ ½Spaltehøyde(Linjer)
Spaltehøyde = (Eksponeringstid(Linjer)÷ Linjetidsforsinkelse)×2
Kontroller for skanneretning
Det finnes tre alternativer for retningen på rulleporten:
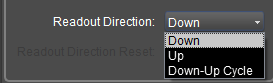
DegenSkanneretningen nedover er standard skanneretning for sCMOS-kameraer. Rullende lukker starter fra den første raden øverst på sensoren og skanner ned til den siste raden nederst. Hver påfølgende bildeopptak starter med den første raden øverst.
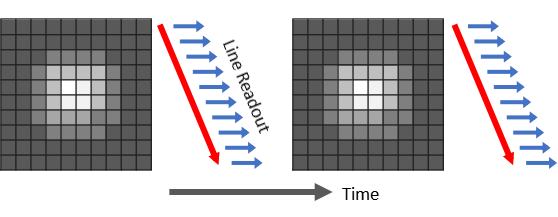
Figur 6: Skjematisk fremstilling av nedadgående skannemodus
Up:I oppoverskanningsmodus starter rullende lukker fra nederste rad og skanner opp til øverste rad i første rad. Hver påfølgende bildeinnsamling starter fra nederste rad. Selv om rekkefølgen for datafangst på kameraet nå er reversert, vil det resulterende bildet som leveres til programvaren fortsatt vise den opprinnelige retningen, dvs. bildet vil ikke bli speilvendt vertikalt i forhold til nedoverskanningsmodus.
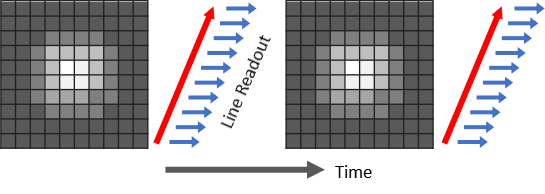
Figur 7: Skjematisk oversikt over oppovergående skannemodus
Ned-opp-syklus:Når du skanner vekselvis opp og ned, starter rullelukkeren fra den første raden øverst og går ned til den siste raden nederst. For neste bilde starter rullelukkeren fra den nederste raden og skanner opp til den øverste raden, og så videre. Retningen til bildet som er tatt i denne modusen er den samme som den nedovergående skanneretningen.

Figur 8: Skjematisk oversikt over skannemodus for ned-opp-syklus
• Reatvil Retning Tilbakestill
Denne funksjonen er bare tilgjengelig i ned-opp-syklusmodus.
Standardinnstillingen for denne parameteren er «Ja», som sikrer at det første bildet i hver nye opptakssekvens starter på den øverste raden og skanner nedover.
Når denne parameteren er satt til «Nei», vil det første bildet i hvert nye opptak starte der det siste bildet i forrige sekvens var. Hvis det siste bildet slutter på den nederste raden, vil det første bildet i påfølgende opptak starte på den nederste raden og forplante seg oppover.











